1 pipeline
ISA review¶
Instruction Set Principles¶
- type of internal storage:
- stack
- accumulator
- register
GPR: General Purpose Register TOS: Top Of Stack

Risc-V (RR): - To apply arithmetic operations - Load values from memory into registers - Store result from register to memory - Memory is byte addressed - Each address identifies an 8-bit byte - Words are aligned in memory - Address must be a multiple of 4 - RISC-V is Little Endian - Least-significant byte at least address
- RISC-V ISA designed for pipelining
- All instructions are 32-bits
- Easier to fetch and decode in one cycle
- c.f. x86: 1- to 17-byte instructions
- Few and regular instruction formats
- Can decode and read registers in one step
- Load/store addressing
- Can calculate address in 3rd stage, access memory in 4th stage
- Alignment of memory operands
- Memory access takes only one cycle
- All instructions are 32-bits
Format of instructions¶
- Six Basic Instruction formats (similar to MIPS, but optimized)
- Reduce combinational logic delay
- Extend addressing range

No subtract immediate instruction,Just use a negative constant - addi x8, x9, -1
Address mode¶
- immediate addressing
- register addressing
- base addressing
- PC-relative addressing

Classes of pipelining¶

- The pipelining needs the pass time and the empty time
- Pass time: the time for the first task from beginning (entering the pipelining) to ending.
- Empty time: the time for the last task from entering the pipelining to have the result.
single & multi¶
- Single function pipelining
- only one fixed function pipelining (just like five-stages pipeline we will learn)
- Multi function pipelining
- each section of the pipelining can be connected differently for several different functions.
不同连接实现不同的功能

static & dynamic¶
- Static pipelining
- In the same time, each segment of the multi- functional pipelining can only work according to the connection mode of the same function
- 也就是说,只有这一功能实现完毕后才能够切换;考虑流水线充满和排空的时间,如果反复切换功能,效率非常低。
- Dynamic pipelining
- In the same time, each segment of the multi- functional pipelining can be connected in different ways and perform multiple functions at the same time

linear & nonlinear¶
- Linear pipelining
- Each stage of the pipelining is connected serially without feedback loop. When data passes through each segment in the pipelining, each segment can only flow once at most.
- Nonlinear pipelining
- In addition to the serial connection, there is also a feedback loop in the pipelining
- Initial conflit vector -> conflict vector -> state transition graph -> circular queue -> shortest average interval
order & disorder¶
- Ordered pipelining
- In the pipelining, the outflow order of tasks is exactly the same as the inflow order. Each task flows by sequence in each segment of the pipelining
- Disordered pipelining
- In the pipelining, the outflow order of tasks is not the same as the inflow order. The later tasks are allowed completed first
An Implementation of Pipelining¶
单纯从理解流水线来看,我们的流水线 CPU 应该是:

Single-Cycle Datapath to the Pipelined Version¶
从单周期 CPU 的架构,试图将多条指令分阶段进行“并行”:

Help
上图中,横轴表示时钟周期,纵轴依次表示下一条指令。
右半部分灰色表示将要向该部件进行读取,左半部分灰色表示将要向该部件写入。
我们发现如果我们想要并行多条指令的执行,需要为每个并行指令设置一条数据通路;但是很多时候一些部件是空闲的,我们想要使得各部分部件能够同时处理不同指令的对应阶段,提高利用率。
但是对于同一个部件(例如寄存器

在数据通路上表现如下:

Note
上面的 datapath 在执行一些指令的时候还是有可能存在问题的;例如,在一个 ld 指令中,我们从 inst 中获取了 WB 的目标寄存器,但是在上图中丢失了,我们可能需要将这个寄存器地址不断向后传:

当然,针对不同的指令我们对于在 datapath 上可能“走向不同的分路”,这就需要控制信号,伪代码如下:

Understand Pipelined Control Signals¶
以下面的指令为例:
首先看看常见的流水线图的表示形式:
Multiple-Clock-Cycle Pipeline Diagram of Five Instructions

Traditional Multiple-Clock-Cycle Pipeline Diagram

Single-Clock-Cycle Pipeline Diagram

Review of control lines¶



上图表示,在 ID 阶段我们通过解码指令获取 7 条控制信号,两条用于 EX 阶段、三条用于 MEM 阶段、两条用于 WB 阶段。
最终形成的 Pipelined Datapath with the Control Signals

Performance evaluation of Pipelining¶
Throughput (TP)¶

注意单位是 \((n/p/m)s^{-1}\) 。
实际上各阶段的用时并不相同,用时最长的为瓶颈阶段,其用时为: \(\Delta t_{0} = max(\Delta t_{1}, \Delta t_{2} \dots, \Delta t_{m})\) 。
优化流水线瓶颈阶段
- 将瓶颈阶段进一步细分为可以流水线操作的更小阶段 (Subdivision);
- 重叠执行不同指令的瓶颈阶段 (Repetition)
Speedup (Sp)¶

注意没有单位。
Efficiency (η)¶

注意结果保留百分数。
How Pipelining Improves Performance?
- Decreasing the execution time of an individual instruction ×
- Increasing instruction throughput
Hazard¶
Structal Hazards¶
A required resource is busy -> Use Instruction and data memory simultaneously.

- Problem: Two or more instructions in the pipeline compete for access to a single physical resource
- Solution
- Instructions take it in turns to use resource, some instructions have to stall
- Add more hardware to machine (Can always solve a structural hazard by adding more hardware)
Data Hazards (important in sysII)¶
Data Hazards
Data dependency between instructions, need to wait for previous instruction to complete its data read/write -> Instruction depends on result from previous.

- Problem: Instruction depends on result from previous.
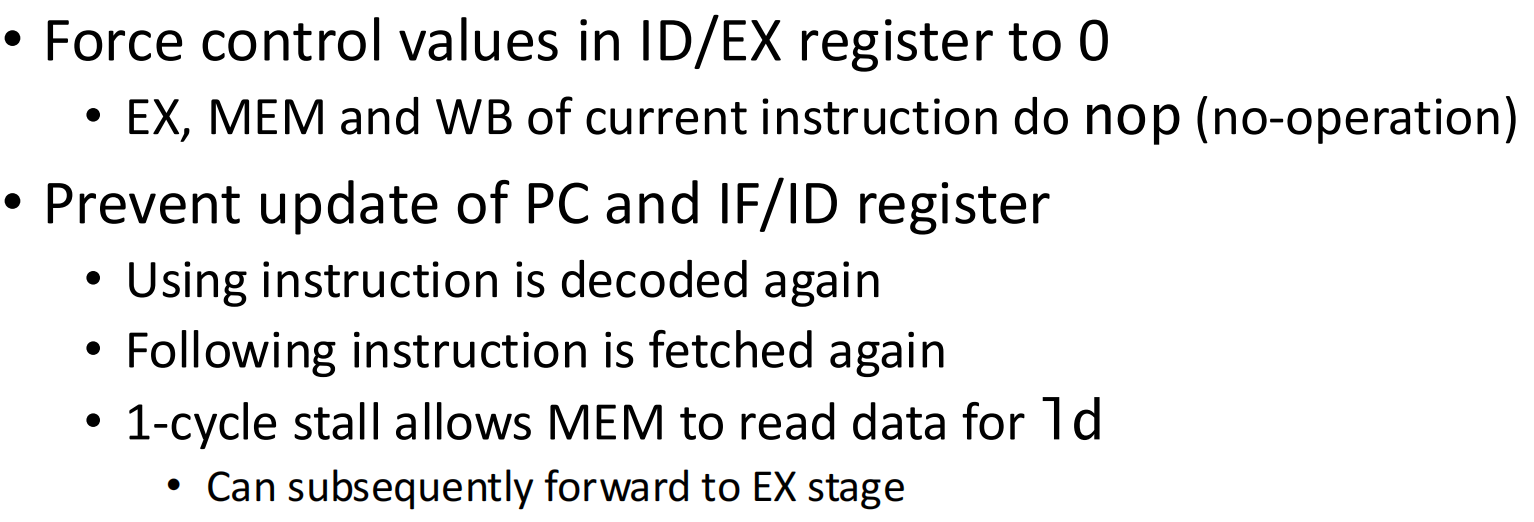
Solution 1: "Stall"¶
Wait for several cycles.
How to stall?
NOP instruction: addi x0, x0, 0
 or
or
Solution 2: “forwarding”¶
Adding extra hardware to retrieve the missing item early from the internal resources.
EX hazard¶
- if (EX/MEM.RegWrite and (EX/MEM.RegisterRd ≠ 0) and (EX/MEM.RegisterRd = ID/EX.RegisterRs1))
- ForwardA = 10
- if (EX/MEM.RegWrite and (EX/MEM.RegisterRd ≠ 0) and (EX/MEM.RegisterRd = ID/EX.RegisterRs2))
- ForwardB = 10
MEM hazard¶
- if (MEM/WB.RegWrite and (MEM/WB.RegisterRd ≠ 0) and (MEM/WB.RegisterRd = ID/EX.RegisterRs1))
- ForwardA = 01
- if (MEM/WB.RegWrite and (MEM/WB.RegisterRd ≠ 0) and (MEM/WB.RegisterRd = ID/EX.RegisterRs2))
- ForwardB = 01
Double Data Hazard¶
作为特殊的 MEM hazards 处理。
Forwarding Conditions¶
Detecting the Need to Forward:


由于一些限制,我们实现的版本是

When can we forward?
在 Multiple-Clock-Cycle Pipeline Diagram of Five Instructions 中表现为:可以向左下方传递,但是不能向右下方传递(如 load-use data hazard


Solution 3: "Double bubble"¶

Control Hazards ( 期末不用太管 ) ¶
Flow of execution depends on previous instruction.
Solution 1: "Stall"¶
等待,直到控制指令计算完成。
Solution 2: "Prediction"¶
预测分支的跳转情况: - 简单:总是认为(不)发生跳转; - 复杂:分析,如果是往低地址,大概率需要跳转; - 动态:记录历史跳转情况。
Solution 3: "Delayed Decision"¶
将 branch 前的无关指令移动到 branch 之后的 bubble 处(分支延迟槽)执行,减少为了等待而插入的无意义 bubble 代码
Multiple Issue¶
ILP: Instruction-Level Parallelism.
- Pipelining: executing multiple instructions in parallel. To increase ILP
- Deeper pipeline
- the number of segment in a pipelining is called the depth of the pipeline.
- Less work per stage -> shorter clock cycle
- Multiple issue
- Replicate pipeline stages -> multiple pipelines
- Start multiple instructions per clock cycle
- CPI < 1, so use Instructions Per Cycle (IPC)
- E.g., 4GHz 4-way multiple-issue
- 16 BIPS, peak CPI = 0.25, peak IPC = 4
- But dependencies reduce this in practice
- Deeper pipeline
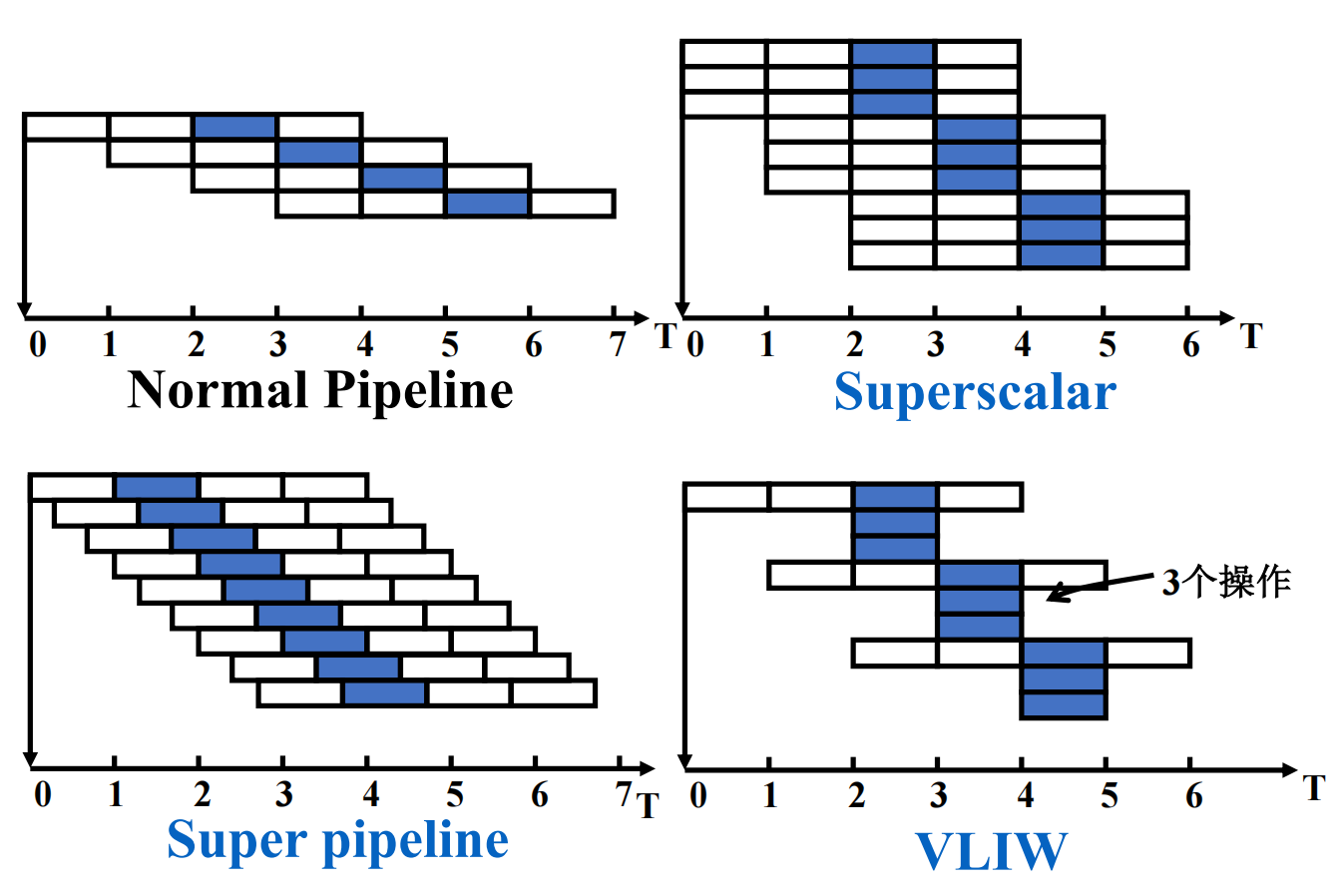
Comparison of the spatiotemporal diagrams ( 时空图 ) of instructions executed by single-issue and multiple-issue processors。

Two types of multiple-issue¶
- Static multiple issue
- Compiler groups instructions to be issued together
- it must remove some/all hazards
- Packages them into “issue slots”
- no dependencies with a packet
- Compiler detects and avoids hazards
- pad with NOP if necessary
- Compiler groups instructions to be issued together
- Dynamic multiple issue
- CPU examines instruction stream and chooses instructions to issue each cycle
- avoiding structal and data hazards
- Avoids the need for compiler scheduling
- Compiler can help by reordering instructions
- CPU resolves hazards using advanced techniques at runtime (Speculation, i.e. Guess)
- allow cpu to execute instructions out of order to avoid stalls
- but commit result to register in order
- why not just let the compiler schedule code ?
- not all stalls are predicable
- can't always schedule around branches
- Different ISA implementation
- CPU examines instruction stream and chooses instructions to issue each cycle
- But Multiple Issue not works as much as we’d like:
- Programs have real dependencies that limit ILP
- Some dependencies are hard to eliminate
- e.g., pointer aliasing
- Some parallelism is hard to expose
- Limited window size during instruction issue
- Memory delays and limited bandwidth
- Hard to keep pipelines full

Two types of multiple-issue processor¶
- Superscalar
- The number of instructions which are issued in each clock cycle is not fixed. It depends on the specific circumstances of the code. (1-8, with upper limit)
- Suppose this upper limit is n, then the processor is called n-issue.
- It can be statically scheduled through the compiler, or dynamically scheduled based on Tomasulo algorithm.
- This method is the most successful method for general computing at present.
- VLIW (Very Long Instruction Word)
- The number of instructions which are issued in each clock cycle is fixed (4-16), and these instructions constitute a long instruction or an instruction packet
- In the instruction packet, the parallelism between instructions is explicitly expressed through instructions
- Instruction scheduling is done statically by the compiler
- It has been successfully applied to digital signal processing and multimedia applications
Super-Pipeline¶
- Each pipeline stage is further subdivided (like deeper pipeline)
- Multiple instructions can be time-shared in one clock cycle

For a super-pipelined computer that can flow out n instructions per clock cycle, these n instructions are not flowed out at the same time, but one instruction is flowed out every 1/n clock cycle.